[제어공학개론] Lec 01 - Introduction
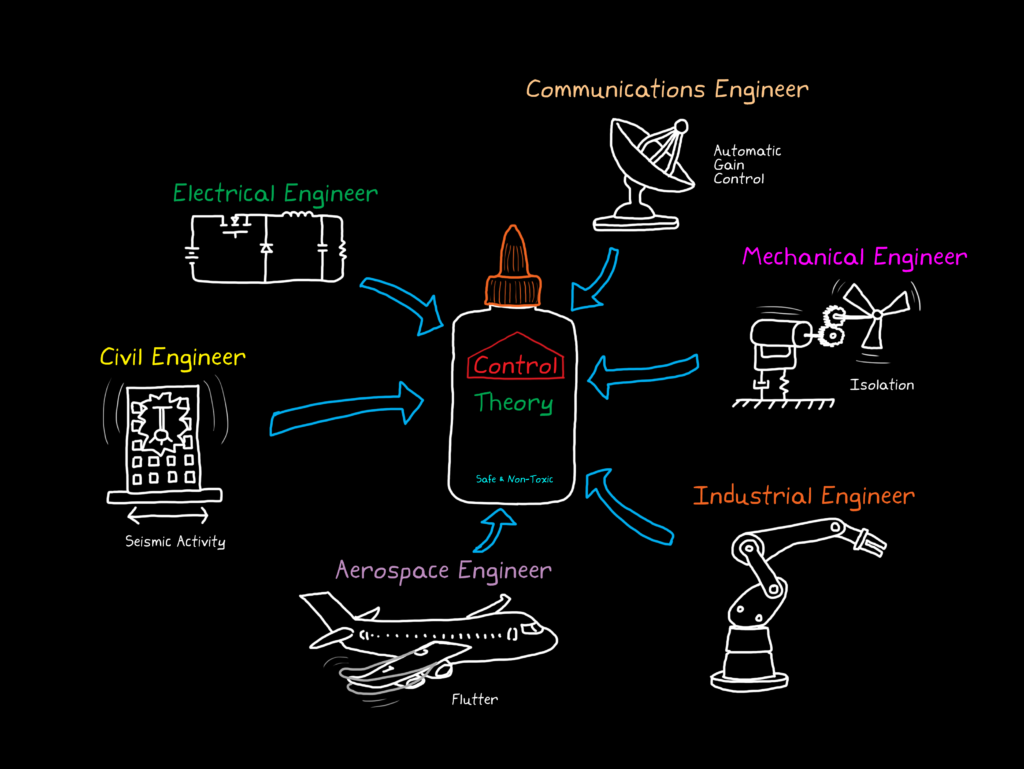
제어공학개론의 첫 수업에서는 제어의 정의와 과정, 예시로 드론을 통해 입력 설계의 필요성을 설명했습니다. 제어 시스템은 입력과 출력의 관계를 모델링하고, 피드백을 통해 외란을 줄이며 시스템의 강인성과 동적 특성을 개선합니다. 다음 포스트에서는 다양한 모델링 방법에 대해 다룰 예정입니다.
제어공학개론의 첫 수업에서는 제어의 정의와 과정, 예시로 드론을 통해 입력 설계의 필요성을 설명했습니다. 제어 시스템은 입력과 출력의 관계를 모델링하고, 피드백을 통해 외란을 줄이며 시스템의 강인성과 동적 특성을 개선합니다. 다음 포스트에서는 다양한 모델링 방법에 대해 다룰 예정입니다.
Precaution 서울대학교 김영 교수님의 과학의 철학적 이해 23-2 의 Lecture note 입니다. 지식 발전과 미래 예측 재귀적 구조 때문에 논리적으로는 미래 예측이 불가하다. -칼 포퍼 전제 1 : 인간 역사의 진행 과정은 인간 지식의 발전에 의해 강하게 영향 받는다. (우리가 무엇을 새로 알게 되는가에 의해) 전...

Precaution 서울대학교 김영 교수님의 과학의 철학적 이해 23-2 의 Lecture note 입니다. 패러다임과 창의적 해결 능력 학습의 목표는 이해인가? 세계 인식과 문제 해결에서 원리(추상적 규칙)가 우선한다는 일반적 통념은, 기억에 대한 폄하와 경시를 낳고 창의성(창조성, 천재성)에 대한 대중적 편견을 강화하여 잘못된...
Precaution 서울대학교 김영 교수님의 과학의 철학적 이해 23-2 의 Lecture note 입니다. Kuhn의 Paradigm paradigm과 대치되는 단어 : rule(규칙) 정상 과학은 추상적 규칙을 기본 단위로 하지 않으며, 패러다임이라는 기본 단위로 정상 과학의 활동이 진행됨 과학 활동의 기본 단위는 패러다임이며, 이...
문제 1 (1) 헬렌 켈러는 말하였습니다. “행복의 한 쪽 문이 닫힐 때, 다른 한 쪽 문은 열린다. 하지만 우리는 그 닫힌 문만 오래 바라보느라 우리에게 열린 다른 문을 보지 못한다.” → 이 말의 가치론적인 함축을 논리적 관점에서 풀어서 설명해 보아요.(2.2점) 헬렌 켈러의 명언은, 자신의 생각 자체가 잘못되었음을 깨닫고 다른, 혹은 더 나...

Precaution 서울대학교 김영 교수님의 과학의 철학적 이해 23-2 의 Lecture note 입니다. 토마스 쿤, “과학혁명의 구조” 철학, 역사를 전공하지 않고 평범한 과학자의 길을 걸었으나, 가장 영향력 있는 책 출간. 참고 : 1962년 부근의 시대상은 상대주의 사상으로 서구 과학 기술문명에 대한 비판이 고조되던 시기 ...

Precaution 서울대학교 김영 교수님의 과학의 철학적 이해 23-2 의 Lecture note 입니다. 과학의 형이상학 Karl Popper : 모든 좋은 과학 이론은 일종의 금지이다. (당위적 의미가 아닌 물리적 불가능성을 의미한다) 인간에 대해서는 제한 조건의 의미 불가능성의 3가지 종류 논리적 불가능성 : 모순이 나타나는 ...

Precaution 서울대학교 김영 교수님의 과학의 철학적 이해 23-2 의 Lecture note 입니다. 귀납법은 과학의 논리가 될 수 있는가? 칼 포퍼의 반증주의 과학의 핵심적 방법은 실험및 관찰(경험적 방법), 핵심적 논리는 귀납법으로 전통적 견해인 연역법과 대조 일반적 통념과는 다른 파격적인 견해를 제시한 칼 포퍼. ...