[제어공학개론] Lec 15 - Classical control
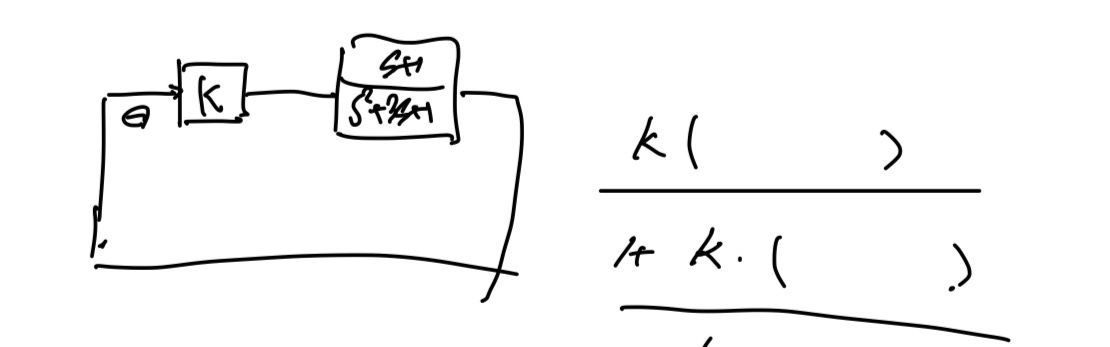
제어공학 개론에서는 Routh-Hurwitz 기준을 통해 다항식의 근의 실수 부분의 부호 변화를 확인하고, Root Locus를 이용해 피드백 시스템의 안정성을 판단하는 방법을 설명합니다. Routh-Hurwitz 기준을 통해 다항식의 계수를 이용해 안정성을 체크하며, Root Locus는 개방 루프의 극과 제로의 위치 변화를 시각화하여 시스템의 안정...
제어공학 개론에서는 Routh-Hurwitz 기준을 통해 다항식의 근의 실수 부분의 부호 변화를 확인하고, Root Locus를 이용해 피드백 시스템의 안정성을 판단하는 방법을 설명합니다. Routh-Hurwitz 기준을 통해 다항식의 계수를 이용해 안정성을 체크하며, Root Locus는 개방 루프의 극과 제로의 위치 변화를 시각화하여 시스템의 안정...
최적 제어에 관한 강의에서는 상태 피드백을 이용해 시스템을 최적화하는 방법을 다룹니다. 알제브라릭 리카티 방정식을 통해 최적 제어 입력을 도출하고, Q와 R의 물리적 의미를 설명합니다. Q는 상태의 상대적 비용 가중치를 나타내고, R은 제어 입력의 비용을 나타냅니다. 또한, 강화 학습 방법과 관련하여 V(x)를 학습하는 과정도 언급됩니다.
제어공학의 안정성에 대한 강의에서는 리ャプノ프 안정성, BIBO 안정성, 그리고 리ャ프노프 방정식의 중요성을 다루고 있다. 리ャ프노프 안정성은 특정 평형점에 대한 안정성을 평가하며, 비선형 시스템에서는 여러 평형점에 대해 각각의 안정성을 고려해야 한다. BIBO 안정성은 입력이 유계할 때 출력도 유계해야 함을 의미하며, 이는 A 행렬이 Hurwitz일...
제어공학 개론에서는 상태 피드백 제어와 상태 추정기를 다루며, 상태 피드백 제어는 시스템의 특성 다항식을 변경하는 효과가 있고, Ackermann의 공식을 통해 제어기를 설계할 수 있다. 상태 추정기는 직접 상태를 확인할 수 없을 때 사용되며, 출력 피드백 제어는 상태 추정기를 결합하여 동작한다. 또한, 추적 제어와 분리 원칙, 조르당 형식 및 제어 ...
제어공학에서 관측 가능성은 입력 신호와 출력만으로 상태를 알아낼 수 있는지를 정의하며, 관측 가능성 행렬과 그람 행렬을 통해 시스템의 관측 가능성을 평가할 수 있다. PBH 테스트는 고유값에 대해 행렬의 랭크를 확인하여 관측 불가능한 상태를 식별하는 방법이다.
제어공학 개론 강의에서는 시스템의 안정성, 제어 가능성, 제어 가능성 그라미안, 그리고 다양한 제어 가능성 정의를 다루고 있다. 시스템의 제어 가능성은 A, B 행렬에 의해 결정되며, 특정 초기 상태에서 원하는 목표 상태로 도달할 수 있는지를 통해 판단된다. 또한, 제어 가능성 행렬과 그라미안의 관계, PBH 테스트, 그리고 칼만 분해를 통해 제어 가...
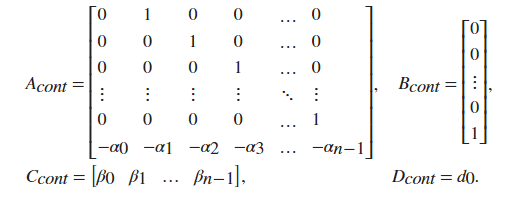
제어공학에서 표준형으로 설정된 시스템의 캐노니컬 형식에 대해 설명하며, 제어 가능성과 관측 가능성의 캐노니컬 형식을 수식과 함께 제시합니다. 각 형식은 시스템의 전이 함수를 나타내며, 교과서에 따라 다르게 정의될 수 있습니다.
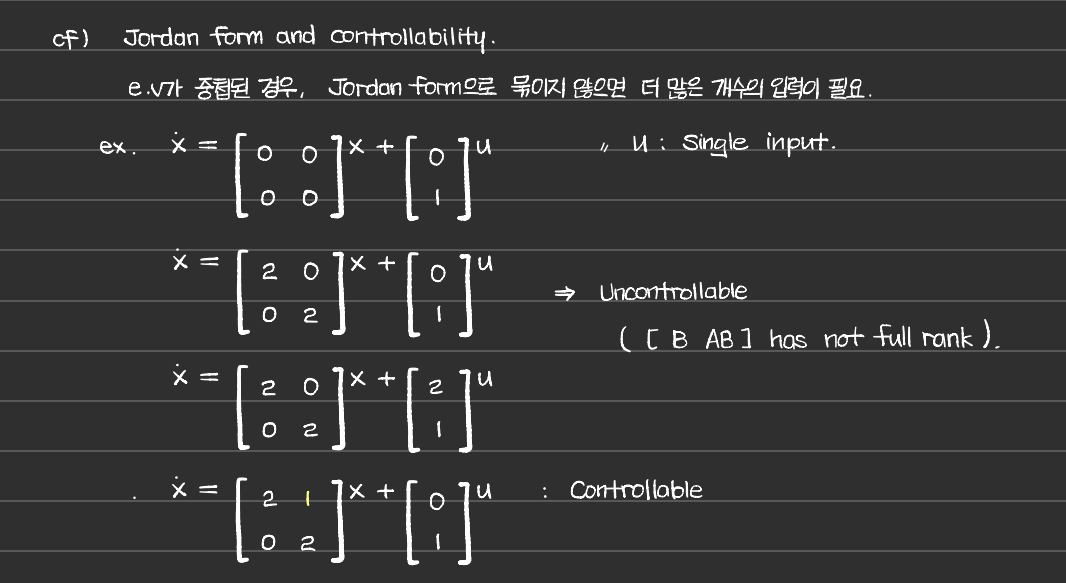
제어공학 개론에서는 대칭 행렬의 고유벡터가 직교하며, 상태 초상화와 조르당 형식에 대한 내용을 다룹니다. 상태 초상화는 상태를 축으로 표시하고, 조르당 형식은 비대각화 가능한 시스템을 제어하는 방법을 설명합니다. 시스템의 제어 가능성을 높이기 위해 폐루프 시스템을 고려하며, 고유값과 고유벡터의 성질이 시스템의 동작에 미치는 영향을 논의합니다.