[제어공학개론] Lec 03 - Steady state response, bode plot
제어공학 개론에서는 안정적인 전달 함수, 정상 상태 응답, 보드 플롯 및 상태 공간 표현에 대해 설명합니다. 안정적인 전달 함수는 모든 극의 실수부가 음수여야 하며, 정상 상태 응답은 입력 신호에 의해 발생합니다. 보드 플롯은 주파수에 따른 전달 함수의 진폭과 위상을 시각화하며, 로그 스케일을 사용하여 저주파와 고주파를 효과적으로 표현합니다. 비선형 시스템의 선형화는 평형점 근처에서의 거동을 분석하는 데 사용됩니다.
📢Precaution
본 게시글은 서울대학교 심형보 교수님의 23-2 제어공학개론 수업 내용을 바탕으로 작성되었습니다.
Stable Transfer function (system)
- P(s)의 모든 pole의 실수부가 음수.
- Consider a differential equation
- P. F. E. 를 통해 1차식으로 분해가 되는 것은 결국 $P(s)$나 $U(s)$의 근
pole의 Real part는 결국 time domain에서의 expotenent에서의 amplitude가 되므로, pole의 실수부가 음수여야지만 시간이 지남에 따라 수렴성이 생김.
즉 Stable Transfer function은 Transfer function의 Pole의 실수부가 모두 음수임.
$Y(s) $ (출력) $= U(s)T(s)$로, 입력의 Laplace transform을 마치 Transfer function과 같이 본다면 출력은 입력의 신호와 Plant의 신호의 합이라고 볼 수 있다.
Steady-state Response to sinusodial Input (steady plant)
suppose… ($u(t) = \sin{\omega t}$)
Steady-state response (정상 상태 response)
- caused by input $u(t)$
- 일정 시간이 지난 후 안정화됨
Transient Response (과도기적 response)
- caused by plant (결국 0으로 수렴하나, 시작 후 잠시동안 존재하는 신호들)
Sin파의 입력을 넣는다면,
\[y_{ss}(t) = |P(jw)| \sin{(\omega t + \angle P(j\omega))}\]$\omega$의 주파수를 갖는 사인파를 넣는다면, 출력 또한 $\omega$의 주파수를 갖게 됨 : LTI system이기 때문(선형 시불변 시스템)
Transients : $P(s)$의 poles에 의해 생긴 것을 PFE 하는 것이므로, 결국 수렴함.
Proof :
\[\begin{aligned}Y(s) &= P(s)U(s) \\ &= P(s)\frac{\omega}{s^2+\omega^2} = \frac{as+b}{s^2+\omega^2} + \text{ Transients} \end{aligned}\]Multiplying $(s-j\omega)$ on both sides :
\[\begin{aligned}P(s)\cdot \frac{\omega}{s^2+\omega^2} &= \frac{as+b}{s+j\omega} \\ s=+j\omega& \\ P(j\omega) \frac{\omega}{2j\omega} &= \frac{as+b}{2j\omega} \\ P(j\omega) &= aj +\frac{b}{\omega}\end{aligned}\]Magnitude & angle :
\[\begin{aligned} |P(j\omega)| &= \sqrt{\bigg(a^2 + \frac{b^2}{\omega^2}\bigg)} \\ \angle P(j\omega) &= \tan^{-1} {\bigg(\frac{b}{a\omega}\bigg)} \end{aligned}\]To get $y(t)$ :
\[\begin{aligned} y(t) &= \mathcal{L}^{-1}\{\frac{as+b\cdot \omega/\omega}{s^2+\omega^2}\} = a\cos { \omega t} + \frac{b}{\omega} \sin{\omega t} \\ &= |P(j\omega)| \bigg(\sin{\angle P(j\omega) \cos{\omega t} + \cos \angle{P(j\omega) }\sin \omega t}\bigg) \\ &= |P(j\omega)| \sin{\bigg(\omega t + \angle P(j\omega)\bigg)} \end{aligned}\]For example :
\[\begin{aligned} u(t) &= 2\sin{t} + 3\cos{(2t+1)} \\ T(s) &= \frac{1}{s+1} \end{aligned}\]signal의 중첩의 경우, Linearity holds.
\[\begin{aligned} |P(j\omega)| &= |\frac{1}{j\omega+1}| \\ \angle P(j\omega) &= \angle \frac{1}{1+j\omega} \\ |P(1\cdot j)| &= |\frac{1}{1+j}| = \frac{1}{\sqrt 2} \\ \angle P(1\cdot j) &= \angle \frac{1}{1+j}= -\frac{\pi}{4} \\ |P(2\cdot j)| &= |\frac{1}{1+2j}| = \frac{1}{\sqrt 5} \\ \angle P(2\cdot j) &= \angle \frac{1}{1+2j}= \theta \end{aligned}\] \[\begin{aligned} y(t) &= 2 |P(j)| \sin(t+\angle P(j)) + 3 |P(2j)|\cos(2t+1+\angle P(2j)) \\ &=\sqrt 2 \sin(t-\frac{\pi}{4}) + \frac{3}{\sqrt 5} \cos (2t+1+\theta) \end{aligned}\]주파수에 따른 증폭비, Phase angle이 다르며, 이를 Plotting 한 것이 Bode Plot이다.
Steady state Response to arbitary input
Fourier transform을 통해서 function을 sin, cos으로 만들고, 위의 과정을 반복하면 됨.
Input signal u(t)의 푸리에 변환 $u(j\omega)$를 그대로 활용할 수 있음. (물론 scale의 변환은 거쳐야 하지만)
$\left.P(s)\right\vert_{s=j\omega}$ 는 안정하다는 조건이 붙어야만 넣을 수 있음.
Bode plot
Transfer function의 Amplitude와 Angle을 주파수 $\omega$에 따라 plot한 것.
Amplitude, freq에는 각각 $20\log_{10}$, $\log_{10}$을 씌운 뒤 plot
각각을 Magnitude plot, Phase plot이라고 함.
- log를 씌웠을 때의 장점 : 저주파에 대한 해상력이 높으며, 고주파 대역도 넓은 범위를 한 눈에 볼 수 있음
- log를 씌웠을 떄의 단점 : DC gain을 보기에는 적합하지 않음. (DC gain of the system : input=1은 $\cos 0\cdot t$로 볼 수 있는데, 이 때의 Amplitude는 $\omega=0, \log_{10}\omega =-\infty$이므로, 그래프에 표시되지 않음.)
Reason why $20\log_{10}$
dB : “decibel”
X=1, 0dB / X=10, 20dB / X=$\sqrt 2$ , 3.01dB
즉 dB는 증폭비를 의미함.
20dB 단위로 신호가 10배가 됨.
Bode plotting Rational Transfer function
All polynomials can be expressed in product of 1st, 2nd order polynomials (Real)
for example :
\[P(s) = \frac{(s+z_1)(s+z_2)}{(s+\lambda_1)(s+\lambda_2)^2(s^2+\zeta \omega_n s + \omega_n^2)}\]전체 $P(s) = P(j\omega)$로 놓고, 식의 양변에 $20\log_{10}$, 절댓값을 취해 주면,
\[\begin{aligned} 20\log_{10}|P(j\omega)| =\ & 20\log|j\omega+z_1| + 20\omega|j\omega + z_2| \\ &- 20\log|j\omega+\lambda_1| - 20\log|j\omega + \lambda_2| \\ &-20\log|(j\omega)^2 + \zeta\omega_n j\omega + \omega_n^2| \end{aligned}\]First order polynomial
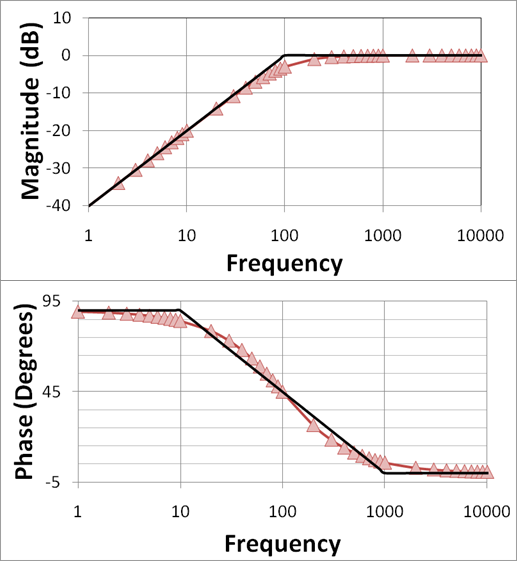
\[20\log|j\omega+z_1|\]- $\omega«z_1$
- (given) $\approx20\log z_1$
- $\omega\approx z_1$
- (given) $\approx20\log \sqrt 2 z_1$
- $\omega»z_1$
- (given) $\approx20\log \omega$
$\omega$가 작을 때는 $\omega$의 값에 영향을 받지 않는 상수함수.
$\omega$와 $z_1$의 크기가 비슷할 때는 약 $\sqrt 2$만큼 차이가 나게 됨. (상수함수 보다)
$\omega$의 크기가 더 클 때는 기울기가 20 dB/decade인 선형함수가 됨.
20 dB/decade : 10배당 20dB가 차이나는 것. (Bode Amplitude plot에서 20과 동일)
- zero : 해당 값 이후로 무조건 상승
- pole : 해당 값 이후로 무조건 하락
Phase plot의 경우 : 각각의 phase들의 summation으로 이미 이루어져 있으므로, 굳이 log를 취하지 않고 계산해도 됨. (각각의 합)
\[\angle P(j\omega) = \angle (j\omega + z_1) + \angle (j\omega + z_2) + \cdots - \angle(j\omega + \lambda_1) + \cdots\]Second order polynomial
consider :
\[20\log \vert\frac{\omega_n^2}{(j\omega)^2 + 2\zeta \omega_n s + \omega_n^2}\vert\]root of $s^2 + 2\zeta \omega_n s + \omega_n^2=0$
\[\begin{aligned} s &= -\zeta \omega_n \pm\omega_n\sqrt{\zeta^2-1} \\ s &= -\zeta \omega_n \pm j\omega_n \sqrt{1-\zeta^2} \end{aligned}\]- $\omega_n$
- natural frequency
- $\zeta$
- Damping ratio (only defined at stable pole, 해가 복소평면상의 2, 3사분면에 존재)
$0<\zeta<1$ : 복소평면에 표시해보면, 양쪽 y축과의 교점이 $\zeta=0$, $\zeta=1$인 지점은 (-1,0)
P(s)에 $j\omega$ 대입시
\[20\log \vert\frac{\omega_n^2}{(\omega_n^2-\omega^2)+j(2\zeta\omega_n))}\vert\]graph로 그려보았을 때…
$\omega$가 작을 때는 $\omega$의 값에 영향을 받지 않는 상수함수.
$\omega$와 $\omega_n$의 크기가 비슷할 때는 $\zeta$의 값에 따라 natural frequency에서 resonence를 일으키게 됨. 특히 $\zeta$가 0일 경우 발산함. $\zeta = 0.707 = 1/\sqrt 2$인 경우 No peak
$\omega$의 크기가 더 클 때는 기울기가 -40 dB/decade인 선형함수가 됨.
Phase plot의 경우 처음 $+\displaystyle{\pi\over 2}$를 유지하다, $\omega_n$을 기점으로 반전되어 $-\displaystyle{\pi\over 2}$가 됨
why natural frequency ? : impulse($\delta(t)$)를 입력시 natural frequency이 가장 dominant하게 진동하는 모습을 볼 수 있음.
$\zeta=0$이어도 impulse를 넣으면 발산하지는 않음. natural frequency에 맞추어 입력신호를 주면 공진
State-space Representation
consider nth order differential equation :
\[\begin{aligned} y^{(3)}(t) + a_2y^{(2)}(t) + \cdots + a_0 y(t) &= b_0 u(t) \\ x_1(t) &= y(t) \\ x_2(t) &=\dot y(t) \\ x_3(t) &= \ddot y(t) \\ &= -a_0x_1-a_1x_2 -a_2x_3-v_0u(t) \end{aligned}\]$x_1, x_2, x_3$ : state(상태 변수)
Matrix representation of Differential Equation
matrix representation of D.E. :
\[\begin{aligned} \dot x(t) &= Ax(t)+ Bu(t) \\ y(t) &= Cx(t)+Du(t) \\ A &= \begin{pmatrix}0 & 1 & 0 \\ 0 & 0 & 1 \\ a_0 & a_1 & a_2\end{pmatrix}\\ B &= \begin{bmatrix}0 \\ 0 \\ b_0\end{bmatrix}\\ C &= \begin{bmatrix}1 & 0 & 0\end{bmatrix}\\ D &= [0] \end{aligned}\]비선형 시스템의 선형화
consider nonlinear system :
\[\dot z(t) = f(z(t), v(t))\]$v(t)$ is input of the system, $f(z)$ is $(n\times 1)$ vector.
Equibrilium (평형점) :
\[\dot z = f(z) = 0\]평형상태에선 시간에 따른 변화가 없어야 하므로, 평형점의 $z=z^*$
- 평형점의 유일성은 보장되지 않음.
example )
\[\begin{aligned} \dot z_1 &= z_2 \\ \dot z_2 &= z_1^2 - 1 + \cos{(z_2)} \end{aligned}\] \[\begin{aligned}f(z) &= f(z^*)+ f'(z^*)(z-z^*)+\text{H.O.T} \\ f(z) &= f(z^*) + \frac{\partial f}{\partial x} (z^*)(z-z^*) +\text{H.O.T}\end{aligned}\]Equibrilium이므로,
\[{\bf f}(z) = {\bf f}(z^)+ \frac{\partial f}{\partial \bf z}(z^)(z-z^*)+\text{H.O.T}\]H.O.T(Higher order term) : $z-z^*$의 2차 이상 항은 0으로 근사 가능.
- $\displaystyle\frac{\partial f}{\partial \bf x}$
- Jacobian of f
$\frac{\partial f}{\partial \bf x}(z^)$ : f의 Jacobian을 계산한 다음, z자리에 $z^$을 대입한 것.
Equibrilium 기준 $f(z^* ) = 0$이며, $\frac{\partial f}{\partial \bf x}$ 은 $(n\times n)$ matrix 이므로 이를 정리하면,
\[f(z) \approx A (z-z^* )\] \[\text{z value near } z^*\]치환을 통한 $z^* $의 소거
치환을 통해 간단한 선형시스템으로의 Linearlize($\dot x = Ax$)로 전환이 가능.
\[\begin{aligned} \text{let } {\bf x} &= {\bf z} - {\bf z^* } \\ \dot {\bf x} &= \dot z - 0 = A{\bf x} \end{aligned}\]Input이 있는 경우의 선형화
먼저 입력 $v^{*}$ 이 입력되었다고 가정하고,
$f(z^{}, v^{})=0$을 만족시키는 $z^{}, v^{}$ 을 찾기.
\[\begin{aligned} \text{Find } &z^*, v^* \text{such that } f(z^*, v^*)=0 \\ f(z, v) =& f(z^*, v^*) + \frac{\partial f}{\partial z}(z^*, v^*) (z-z^*) + \\ & \frac{\partial f}{\partial v}(z^*, v^*) (v-v^*) + \text{H.O.T} \\ =& A{\bf x} + B {\bf u} \\ \end{aligned}\] \[A = \frac{\partial f}{\partial z}(z^*, v^*) , B=\frac{\partial f}{\partial v}(z^*, v^*)\]with the same method, we also can linearlize output of non-linear function
let’s say $w(t) = h(z(t), v(t))$
\[f(z^*, v^*)=0, \ h(z^*, v^*)=:w^* \\\] \[\begin{aligned} w(z, v) =& w(z^*, v^*) + \frac{\partial w}{\partial z}(z^*, v^*) (z-z^*) + \\ &\frac{\partial w}{\partial v}(z^*, v^*) (v-v^*) + \text{H.O.T} \\ \\ y =& w(z,v)-w^*= C{\bf x} + D{\bf u} \end{aligned}\] \[C = \frac{\partial w}{\partial z}(z^*, v^*) , D=\frac{\partial w}{\partial v}(z^*, v^*)\]