[공수2] - Chap 9 벡터 미분
9.3 Curves
- Curve : 1개의 매개변수 t로 매개화 가능한 경우
Curve의 미분
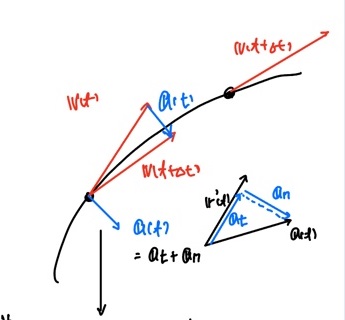
a 의 방향 : 진행방향의 수직인 방향과 수평인 방향 성분으로 나뉨. (구심 가속도 생각해보기.)
$\boldsymbol{a} = \boldsymbol{a}_n + \boldsymbol{a}_t$
$\boldsymbol{a}_t = \text{proj }\boldsymbol{v}(\boldsymbol{a})$
proj (정사영은 정의를 생각해보면, $\boldsymbol{a}$ 벡터 크기의 $cos $ 만큼의 크기를 $\boldsymbol{v}$ 방향 단위벡터에 곱한 것.)
1
추가적으로, $v ^2 = v v $이므로, 내적을 이용하여 proj를 표현하는 것이 더 편할 수도 있다.
원
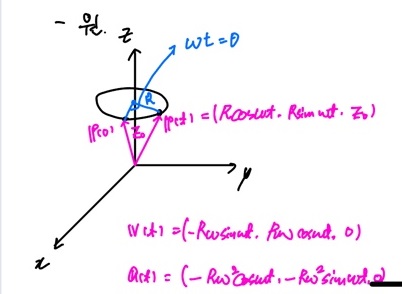
Z좌표가 $z_0$이면서 $x-y$평면에 평행한 평면 위, 중심이 $(0, 0, z_0)$이고, 반지름이 $R$ 인 원을 생각하자.
각속도는 $ω$
1
- 속도와 가속도의 크기
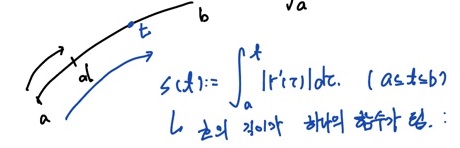
Length of curve
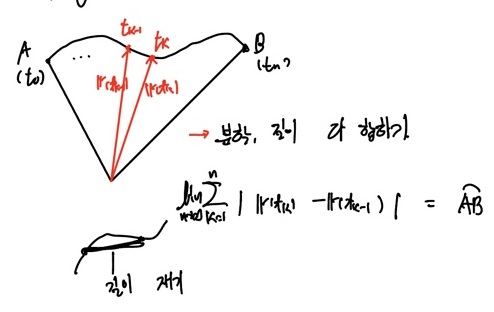
- 시점 $a = t_0$ 에서의 점 _A_와 시점 $b = t_n$ 에서의 점 $B$ 사이에서 매개변수 $t$의 구간 $[a, b]$ 를 $n$등분 하였을 때, $\overline{AB}$ 는 각각의 $n$등분된 선분의 길이의 합과 유사하다.
- 중간값 정리에 의해
1
정적분의 정의에서 활용한 점을 이용하면, $t_k - t_{k-1} = {b-an} $, 즉 등간격이므로,
위 식의 해석 :
$r’(t) $ : 속력
$dt $ : 시간
속력 × 시간 = 길이 가 되어, 물리에서의 직관과 일치함을 알 수 있다.
호(arc), 길이로의 매개화
- 원의 일부 → 호 , 곡선의 일부 또한 호(arc)
- arc의 길이 :
$t = a$ (시점)부터 $[a, b]$ 구간 내의 임의의 $t$에 대해 호의 길이 또한 하나의 함수가 됨, 또한 구간 내에서 함수는 멈추는 점이 없다면 ($ \boldsymbol{r}’(t) \neq 0$) 증가함수이므로 매개변수 t에 대해 일대일대응이며 역함수가 존재함을 알 수 있다.
- 호의 길이가 하나의 함수가 됨 : arc length function
- 정적분의 기본정리에 의해 성립
- if$ \vert\boldsymbol{r}’(t)\vert \neq 0 (\boldsymbol{v}(t) \neq 0),$
1
2
3
4
5
6
7
s : 증가함수, inverse exists
s : [_a_, _t_] → [0, _L_] : 증가함수.
by chain rule,
Unit vector가 나옴을 알 수 있다. 이를 Unit tangent vector라 부름. 위치벡터를 길이에 대해 미분하면, 크기가 1인 속도벡터를 얻을 수 있다.
Curvature Vector
Definition of curvature vector (u : unit tangent vector, s로 매개화, t로 매개화 상관 x)
이 강의에서만 u 사용, T를 주로 사용
1
if $ r’(t) = 1 $, $\boldsymbol{\kappa} = \boldsymbol{r}''(t)$ (acceration vector)
Another derivation (parameteriaztion using t)
\[{ds \over dt} = \vert r'(t) \vert \ \ \ N(t) := {T'(t) \over \vert T'(t) \vert} \ \ \ \kappa(t) = \vert {dT \over ds}\vert\]T : unit tangent vector, N : unit normal vector
by definition of curverture, and chain rule
\[{dT \over ds} = {dT \over dt} \cdot {dt \over ds} = {T' \over \vert r' \vert}\] \[\kappa(t) = \vert {dT \over ds}\vert = \vert{T'\over \vert r' \vert}\vert\]한편, unit tangent vector의 정의에 의해
\[r'(t) = |r'(t)|T(t)\] \[r''(t) = {d r'(t) \over dt} = {d \vert r'(t) \vert \over dt} T(t) + \vert r'(t) \vert T'(t)\] \[= {d \vert r'(t) \vert \over dt} T(t) + \vert r'(t) \vert^2 \kappa(t) N(t)\] \[r''(t) \times r'(t) = \bigg({d \vert r'(t) \vert \over dt} T(t) + \vert r'(t) \vert^2 \kappa(t) N(t) \bigg) \times \vert r'(t) \vert T(t)\] \[= |r'(t)|3\kappa(t)(N(t) × T(t))\] \[|r''(t) × r'(t)| = |r'(t)|3κ(t)\] \[\therefore \kappa(t) = {\vert r''(t) \times r'(t) \vert \over \vert r'(t) \vert^3}\]또다른 방법으로는, r(t) = cos θî + sin θĵ 로 두고,
$ddt $ 를 표현해 주는 방법으로도 증명 가능.
9.4 Fields
Scalar fields (다변수 함수)
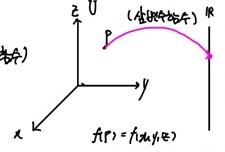
- 공간상의 점 $P \in \R^3$가 $\R$ 로 대응됨.
- 일변수 함수에서의 미분의 정의
- 다변수 함수에서라고 달라질까?, 동일함. but 편미분으로 정의됨 (Partial derivative)
1
- 연속성이 보장되지는 않으나, (편)도함수가 연속이면 _f_는 일급 (_c_) 함수임.
Gradient
- 일변수 함수에서 $f(x)$의 도함수인 $f’(x)$가 존재한다. 동일한 방법으로 Scalar field에서의 각각의 변수에 대한 편도함수를 벡터로 나타낸 것이 gradient.
- 일변수 함수에서의 합성함수의 미분은, chain rule을 따른다.
- more precisely, let’s only consider $x$
- 맨 마지막 줄의 ⋅ 은 inner product임. 일변수 함수와 동일하나, 벡터 형태로 나타내므로 mult가 아닌 inner prod임을 주의
Gradient의 기하학적 의미
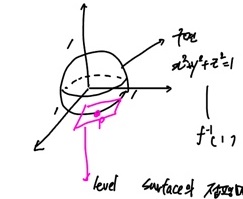
eg) $f(x, y, z) = x^2 + y^2 + z^2 $에서 구면은 f의 함수값이 같은 점들의 집합임.
반지름이 1인 구면 ($x^2+y^2+z^2=1, f^{-1}(1) $ : level surface (f의 1-등위면)
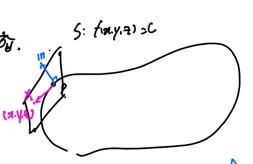
level surface위의 점 P의 접평면 (tangent plane)에 대한 법벡터 n = ∇f(P)
tangent plane 위의 arbitary point X, 평면의 방정식 :
∇f(P) ⋅ (X − P) = 0
9.5 Vector Field
- 벡터장, x,y,z에 대해 벡터가 대응되는것. 다변수 함수가 3개라고 생각해도 됨?
- P점에서의 vector field : P점에서 시작하는 Vector 대응시킴.
V(P) = [V_1(_P), V_2(_P), V_3(_P)]
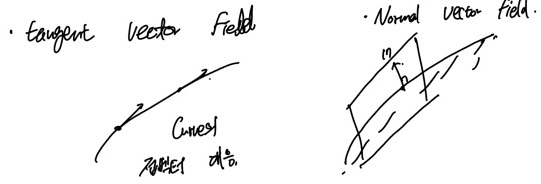
(eg) 곡선에서 정의된 Vector field : tangent vector field. : Curve의 접벡터에 대응되는 Vector field
(eg) Normal vector field : 어떠한 surface위의 점의 tangent surface의 normal vector에 대응.
(eg) 전기력
- 점 P(x, y, z) : 전하량 1
- 점 P(x, y, z) : 전하량 Q
Vector Field 의 미분
divergence
- divergence : Vector Field → Scalar Field
- Physical meaning of divergence
P점을 통과하는 유체의 질량 변화율과 관련이 있음.
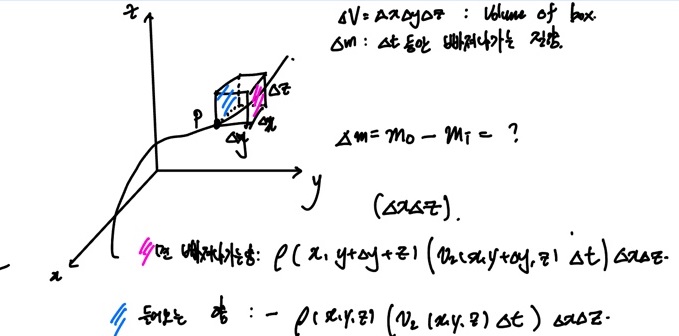
유선 : 공간상에서 유체의 속도 벡터를 이은 것이므로 curve임. 이 위의 점 P에 대해서 미소 길이 Δx, Δy, Δz_를 정의하고, _P(x, y, z)를 한 꼭짓점으로 하는 크기가 각각 dx, dy, dz인 정사각형을 고려하자.
ΔV = ΔxΔyΔz : Volume of the box
Δm = mo − mi : _Δt_의 시간 동안 빠져나가는 유체의 질량.
유체의 밀도를 ρ(x, y, z)라 하자.
x-z Plane의 우측으로 빠져나가는 양
mout, xz = ρ(x, y + Δy, z)(v_2(_x, y + Δy, z)Δt)ΔxΔz
x-z Plane의 좌측으로 들어오는 양
- 최종적으로 x-z Plane으로의 유출량
1
(_Δy_를 분자 분모에 곱하고 dV로 바꿈)
- $y $, P점에서의 x-z 방향의 순간질량변화율이므로, 이를 확장하면,
- 단위체적당 질량 변화율 (${\dot m \over \Delta V}$)
1
단위체적당 질량변화율 _Δm_/_Δt_ = _ṁ_:= _flux_
한편,
m(t_0) = _ρ(P, t_0)_ΔV
m(t_0 + _Δt) = ρ(P, t_0 + _Δt)ΔV
m(t_0 + _Δt) − m(t_0) = _mi − mo
질량 변화량 = - 질량 유출량
mo − mi = −(ρ(P, t_0 + _Δt) − ρ(P, t_0))_ΔV ≈ Δm
이를 div로 정리된 식에 대입 하면,
- Reynolds Transport Theorem (a.k.a. Mass conversion law) , simplified
Laplacian
- Gradient : Scalar Field → Vector Field.
- Divergence : Vector Field → Scalar Field
- Laplacian : Scalar Field → Vector Field → Scalar Field
Curl
- curl : Vector Field → Vector field
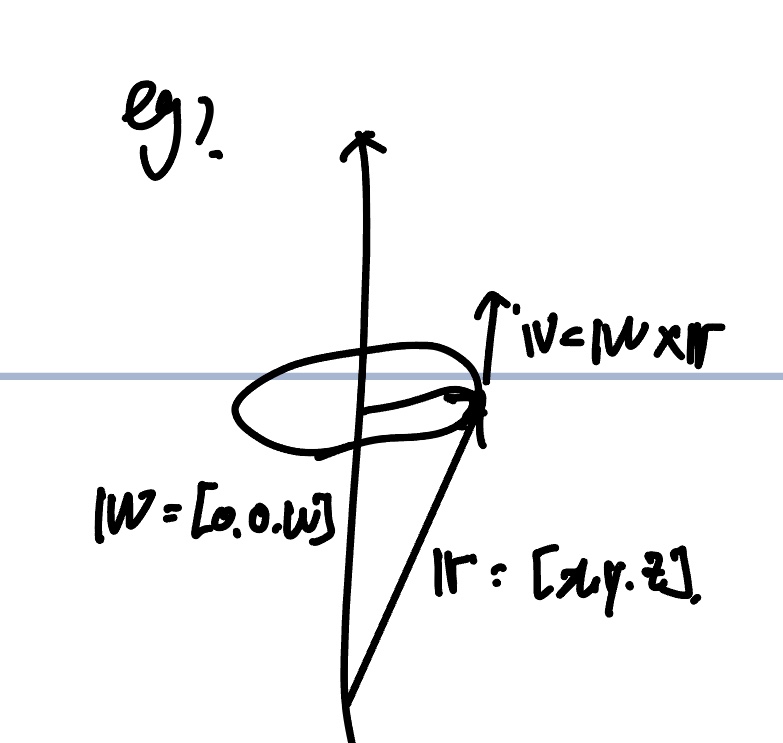
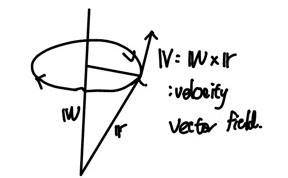
(eg) ω = (0, 0, ω) 로 회전하는 경우를 고려해보자.
\[\boldsymbol r = (x,y,z) \\ \boldsymbol v = \boldsymbol \omega \times \boldsymbol r = [0,0,\omega] \times [x,y,z]\]curl v = curl(ω × r) = curl([−ωy, ωx, 0]) = [0, 0, 2ω]
- 유체의 회전은 ${1 \over 2} \cdot curl \boldsymbol v$ 로 나타낼 수 있음을 알 수 있다.
Proposition rule in vector calculation
- curl (∇f) = ∇ × ∇f = 0
- div(curl v) = 0
- consider triple product rule of vector